EQ6/EQG/Atlas Mod Circuits
EQ DIRECT CONTROL CIRCUIT FOR PC ACCESS
This page shows how to connect your PC directly to the mount's DB9 connector and control the stepper motors without the use of the handcontroller mod.
SOME ADVISE BEFORE IMPLEMENTING THE CIRCUIT
This page presents an alternate option to directly control your mount's stepper motor board. There is not much difference in terms of stepper control functionality from the original modification as they both allow commands to be sent from the PC directly to the stepper controller board.
The difference between the two basically is the number of electronic components required for the mod. The original one requires only three components; the 74HC157 mux chip, a 10k ohm resistor, and a toggle switch which are all soldered on the handcontroller circuit board. The option below does not require you to connect the handcontroller but would require you at least 10 electronic components not including the PCB, serial cables, casing, etc. The reason why the original mod has lesser components is that it utilizes the rs232-TTL conversion circuitry of the handcontroller while the diagram below would require you to produce the same rs232-ttl conversion on a separate circuit board. In any case these two options are identical in terms of functionality and are presented providing the user two possibilities to control the stepper motors of the mount.
CIRCUIT DETAILS
Figure 1 shows a diagram that will allow you to directly connect your PC to the Mount's DB9 Handcontroller Port. The port contains both the 12V power lines and the two TTL level serial data lines. It allows the user to send the commands from the PC's serial port to the mount's handpaddle DB9 port. The circuit utilizes two major components; a RS232C-TTL converter (MAX232) chip and a 5 Volt voltage regulator (7805) that supplies power to the max232 chip. The 7805 source of power comes from pins 1 and 8 of the mount's DB9 connector. Extra care should be provided in avoiding these lines to be inerchanged/shorted to the TTL level lines (pins 9 and 6). Pins 5 and 4 are ground pins.
To send commands to the mount using your own application, you need the EQControl DLL driver .
There are other sample applications (with source codes) that you can use as reference in writing your own codes;
EQContrl Tester - A sample program that tests all functions of EQContrl.DLL
EQGuider - LX200 Emulator Program with variable speed guiding (uses EQContrl.dll)
EQMath - A Sample program that reads the stepper motor positions every 200 milliseconds and converts them
to RA/DEC/ALT/AZ values (uses EQControl.dll)
More applicatons to follow ....
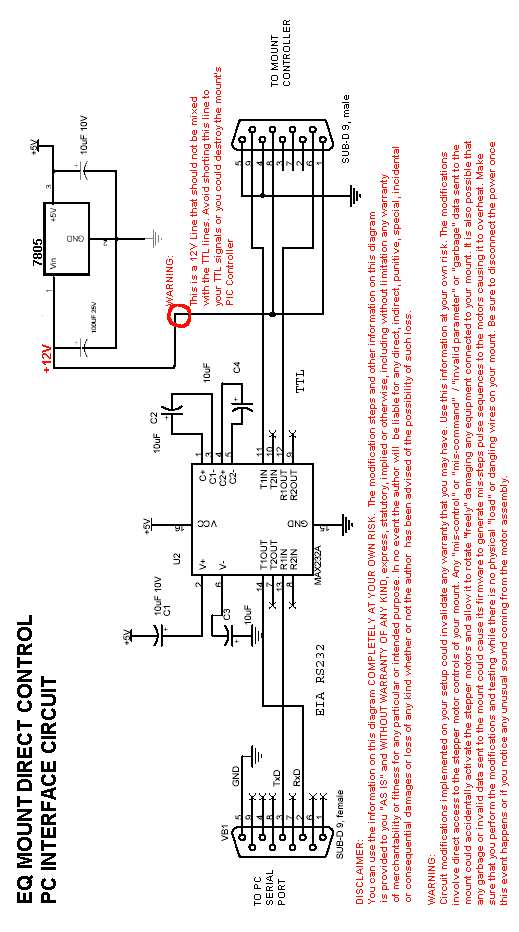
Figure 1: Circuit Diagram for Direct PC access through the mount's DB9 connector
A Readymade circuit for EQDIRECT
Shoestring Astronomy will be producing soon a ready made commercial version of EQDIRECT called EQDIR. This was made possible by Mr. Doug Anderson of Shoestring Astronomy.
You may contact him at sales@shoestringastronomy.com
Below is an image of Shoestring Astronomy's EQDIR:

QUESTIONS AND INQUIRIES
Email your questions at circuitmod@yahoo.com
DISCLAIMER:
You can use the information on this site COMPLETELY AT YOUR OWN RISK. The modification steps and other information on this site is provided to you "AS IS" and WITHOUT WARRANTY OF ANY KIND, express, statutory, implied or otherwise, including without limitation any warranty of merchantability or fitness for any particular or intended purpose. In no event the author will be liable for any direct, indirect, punitive, special, incidental or consequential damages or loss of any kind whether or not the author has been advised of the possibility of such loss.
WARNING:
Circuit modifications implemented on your setup could invalidate any warranty that you may have. Use this information at your own risk. The modifications involve direct access to the stepper motor controls of your mount. Any "mis-control" or "mis-command" / "invalid parameter" or "garbage" data sent to the mount could accidentally activate the stepper motors and allow it to rotate "freely" damaging any equipment connected to your mount. It is also possible that any garbage or invalid data sent to the mount could cause its firmware to generate mis-steps pulse sequences to the motors causing it to overheat. Make sure that you perform the modifications and testing while there is no physical "load" or dangling wires on your mount. Be sure to disconnect the power once this event happens or if you notice any unusual sound coming from the motor assembly.